最近,波士顿动力公司发布了在机器人研究上的最新成果。
在公开的演示中,波士顿动力的机器人Atlas可以完成一系列高难度的体操动作,包括翻筋斗、倒立、360 度的旋转跳跃…许多对于人类都难以完成的动作,Atlas轻松做到了!
时间追溯到2013年,波士顿动力在刚推出原型机的时候,它还只能勉强行走。波士顿动力公司同时宣称,研发的新技术也使得其开发例程、性能比以前更优秀,完成动作的准确率约为80%。
随着科技的迅速发展,机器人和无人系统已经成为未来最热门的科技方向,也是现代科技的制高点、科学研究最为活跃的领域,而移动机器人和机器视觉,是机器人学和人工智能科学中最重要的两大领域。
今天我们就带大家了解下机器人背后的神秘黑科技!
移动机器人技术
移动机器人(Robot)是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动(引自百度百科)。
移动机器人的研究始于60 年代末期。斯坦福研究院(SRI)的Nils Nilssen 和Charles Rosen 等人,在1966年至1972 年中研发出了取名Shakey的自主移动机器人。目的是研究应用人工智能技术,在复杂环境下机器人系统的自主推理、规划和控制(引自百度百科)。
作为机电一体化的集中体现,移动机器人技术将机械设计、力学分析、传感器应用、自动控制以及人机工程学等多学科成果加以融合。
简而言之,移动机器人是一个系统工程,它能通过传感器感知环境和自身状态,实现在有障碍物的环境中面向目标的自主运动。
移动机器人分类
随着机器人性能不断地完善,移动机器人的应用范围也逐步扩大,不仅在常见的工程、医疗等领域中得到广泛的应用,而且在国防和航天等众多高科技领域得到了很好的应用。移动机器人技术也逐步得到世界范围内的普遍关注。
根据移动方式,可分为:轮式移动机器人、步行移动机器人(单腿式、双腿式和多腿式)、履带式移动机器人、爬行机器人、蠕动式机器人和游动式机器人等类型;
按工作环境,可分为:室内移动机器人和室外移动机器人;
按控制体系结构来分,可分为:功能式(水平式)结构机器人、行为式(垂直式)结构机器人和混合式机器人;
按功能和用途来分,可分为:医疗机器人、军用机器人、助残机器人、清洁机器人等(引自百度百科)。
移动机器人可以代替人类在危险、恶劣(如辐射、有毒等)等恶劣环境下作业以及进行一些人类尚不能及的(如宇宙空间、海底等)环境作业,对比一般机器人,具有更大的机动性、灵活性,可进行自行组织、自主运行、自主规划。
鉴于众多小伙伴们的热烈要求,新东方联合毕业于机器人学领域国家级实验室,主攻机器人智能规划、机器人控制、机器人视觉伺服技术,曾参与国家863计划、多项省部级重点项目,并作为核心人员参与我国空间机器人系统研制的知名科研院所导师在这个寒假再次为大家带来机器人控制方向的科研小班项目!!
你会经历:
掌握一种在国际机器人学界最为主流的、最为直观机器人系统仿真方法;
安装、配置机器人仿真试验环境 EAI型移动机器人;
具备快速搭建智能机器人系统试验模型;
提升开展相关计算机视觉识别算法、机器人控制算法、机器人导航跟踪算法编程的能力等
在本项目中,最终会完成机器人仿真建模。
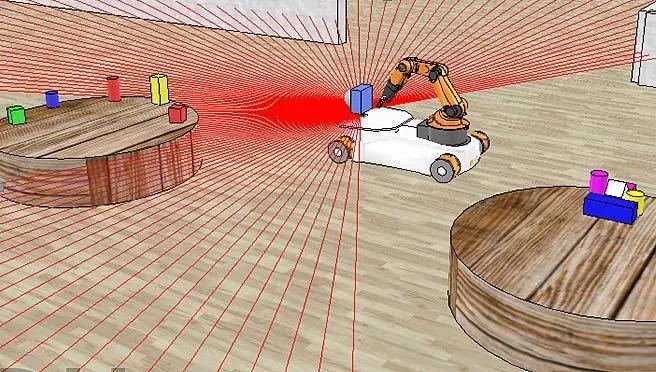
在计算机上实现一个结合移动机器人控制与导航、机械臂机器视觉技术的机器人仿真模型,以此开展机器人导航和抓取综合竞赛,力争时间最短,碰触障碍物最少。
从而打开机器人科学的大门,为深入学习机器人与无人系统奠定基础。
项目流程:
项目地点&参与形式:
北京中关村 面试筛选,主要考察对相关专业知识的理解能力和了解程度
适合学生:
计划申请自动化,计算机,机械,通信等相关专业
项目难度:★★
报名建议:学生需要具有C/C++/Matlab基础,能力较欠缺的学生可提前联系项目老师领取项目资料进行学习,项目中如果希望调整难度,可随时与导师沟通。

















